
Assistant Professor
Phone: +91-9993208579
Email: yogesh[at]mech.nits.ac.in | yogeshsingh15 [at]gmail[dot]com
Date of Joining: 23/07/2018
Academic/Industrial Experience: 5+ years
Google Scholar: Click Here
Personal Website: Click Here
ACADEMIC QUALIFICATIONS (FULL DETAILS )
- B.E. from GEC Jagdalpur, Chhattisgarh
- M. Tech from NIT Rourkela, Odisha
- Ph. D from IIT Indore, Madhya Pradesh
AREA OF INTEREST AND SPECIALIZATION (INCLUDING RESEARCH AREA)
- Planar and Spatial Parallel Motion Platform
- Robotics and Control
- Design and development of the robotic manipulators
- Mechanism and Design
- Mobile Robotic Manipulator, Mobile Robotics
- 3D Printer motion stage design and development
- Micro-stereolithography
- Shape memory alloy actuators
- SMART and Compliant Actuation
- Compliant and Flexible Mechanism
- Underwater Robotics
SHORT BIOGRAPHICAL SKETCH
| B.E. in Mechanical Engineering from GEC Jagdalpur (2008); M. Tech. (Machine Design and Analysis), National Institute of Technology Rourkela (2012); Ph. D. (Mechanical Design), Indian Institute of Technology Indore (2016); Postdoc (Compliant Mechanism), Indian Institute of Technology Bombay (2017) |
PATENT(S)
1. Deep Singh, R. Choudhury, Y. Singh, Manidipto M, SHAPE MEMORY ALLOY BASED CONTACTLESS ROTARY ACTUATOR, 202131009671, Indian Patent, Published
2. Santhakumar Mohan, Yogesh Singh, A MECHANISM OF 2PRP-PRR PLANAR PARALLEL MANIPULATOR AND A METHOD THEREOF, 4678/MUM/2015, Indian Patent, Granted
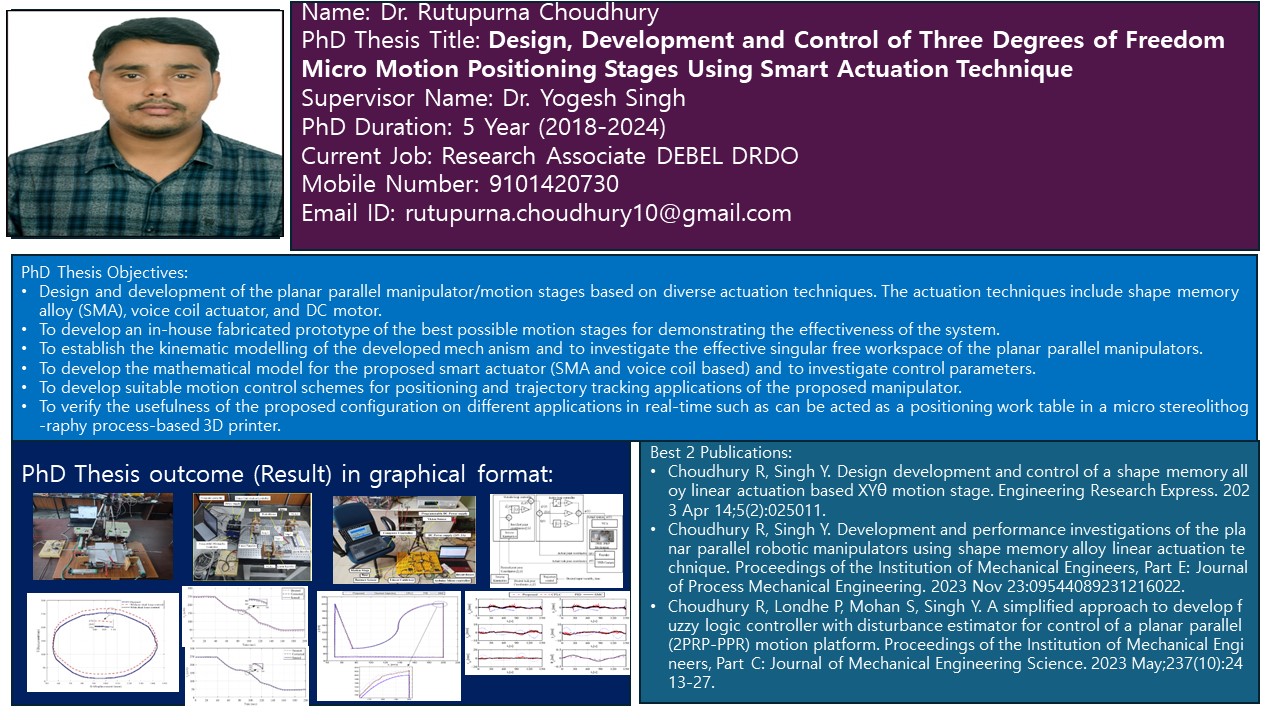
3. Rutupurna Choudhury, Dr. Yogesh singh, RECONFIGURABLE POSITIONING MECHANISM, 202031003986, Indian Patent, Published
4. Deep Singh, Yogesh Singh, Manidipto Mukherjee, PLANAR PARALLEL MANIPULATOR USING SHAPE MEMORY ALLOYACTUATOR, 202031003989, Indian Patent, Published
5. Rutupurna Choudhury, Dr. Yogesh singh, Design And Development Of A Shape Memory Alloy Actuation Based Ankle/Lower Limb Rehabilitation Robotic System, 202431003414, Indian Patent, Published
6. Yogesh Singh, Santhakumar Mohan, Sunney Kumar Saurabh, A VOICE COILACTUATED MOTION STAGE SYSTEM FOR OBJECT TRANSLATION BASED ON A COMPLIANT MECHANISM, 202431003135, Indian Patent, Published
7. Bipul Das, Rajeev Nayan Gupta, Yogesh Singh, Jasper Ramon, Devjani Devi, Bedanta Kumar Saharia, A MANUALLY OPERATIVE SYSTEM FOR MANUFACTURING BOTTLE USING BAMBOO POWDER, 2023/02617, South African Patent, Granted
EDITORSHIP
Editorial Member, Digital Manufacturing Technology, https://ojs.wiserpub.com/index.php/DMT/, Universal Wiser Publisher(UWP)
BOOKS/ BOOK CHAPTERS
- Singh D., Singh Y., Mukherjee M. (2021) Behaviour of NiTi Based Smart Actuator for the Development of Planar Parallel Micro-Motion Stage. In: Kalamkar V., Monkova K. (eds) Advances in Mechanical Engineering. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-3639-7_26
- Singh D., Choudhury R., Singh Y. (2021) Kinematic, Dynamic and Stiffness Analysis of an Asymmetric 2PRP-PPR Planar Parallel Manipulator. In: Kalamkar V., Monkova K. (eds) Advances in Mechanical Engineering. Lecture Notes in Mechanical Engineering. Springer, Singapore. https://doi.org/10.1007/978-981-15-3639-7_12
- Shatarupa Biswas, Yogesh Singh, Manidipto Mukherjee (2020) A Study on Optimization Techniques of Electro Discharge Machining, Materials Forming, Machining and Tribology book series (MFMT), Intelligent Manufacturing. pp 1-35. https://doi.org/10.1007/978-3-030-50312-3.
SUBJECTS TAUGHT (INCLUDING SUBJECTS CURRENTLY TEACHING)
- Mechanism and Machine
- Design of Machine Element
- Robotics
- Mechatronics
MEMBER
AWARDS & RECOGNITIONS
- Post-doctoral fellowship from Indian Institute of Technology Bombay (January 2017-July 2017)
- MHRD Fellowship for the PhD program (2012-2016).
ADMINISTRATIVE RESPONSIBILITY
1. Departmental Placement Coordinator from July 2021
INTERNATIONAL JOURNALS
- Biswas, S., Singh, Y., Mukherjee, M., (2022) Design of Multi-material Model for Wire Electro-discharge Machining of SS304 and SS316 Using Machine Learning and MCDM Techniques, Arabian Journal for Science and Engineering, doi.org/10.1007/s13369-022-06757-x
- Akhileshwar Singh, Krishna Murari Pandey, Yogesh Singh, (2022) Triggering the Splitting Dynamics of Low-Viscous Fingers through Surface Wettability Inside Bifurcating Channel, Mathematical Problems in Engineering, doi.org/10.1155/2022/3462844
- D., Choudhury, R., Singh, Y, (2021) Workspace analysis of 3-DOF U-shape base planar parallel robotic motion stage using shape memory alloy restoration technique (SMART) linear actuators, SN Applied Sciences, 3, doi.org/10.1007/s42452-021-04490-y
- Deep Singh, Rutupurna Choudhury, Manidipto Mukherjee, Yogesh Singh, (2022), Development of non-linear models to evaluate the NiTi SMA spring actuator, Journal of Mechanical Engineering and Sciences, https://doi.org/10.15282/jmes.16.1.2022.09.0692
- A. Singh, Y. Singh and K.M. Pandey (2020) A Review on viscous fingering pattern formation in lifted Hele-Shaw cell. J. Phys.: Conf. Ser. 1455012022. doi:10.1088/1742-6596/1455/1/012022
- A. Singh, Y. Singh and K.M. Pandey (2020) Viscous fingering instabilities in radial Hele-Shaw cell: A review. Materials Today: Proceeding, 26, 760-762. https://doi.org/10.1016/j.matpr.2020.01.022
- Singh D., Singh Y. (2018) Development and analysis of a five degrees of freedom robotic manipulator serving as a goalkeeper to train the football players. IOP Conference Series: Materials Science and Engineering, 402, 012092. https://doi.org/10.1088/1757-899X/402/1/012092
- Singh D., Choudhury R., Singh Y., Mukherjee M. (2020) Development and Workspace Analysis of Smart Actuation based Planar Parallel Robotic Motion Stage. IOP Conference Series: Materials Science and Engineering, 912, 032063. https://doi.org/10.1088/1757-899X/912/3/032063
- Jayant Kumar Mohanta, Yogesh Singh, M.Santhakumar (2017), Manuscript ID ROB-REG-16-0239.R1 entitled “Kinematic and Dynamic Performance Investigations of Asymmetric (U-shape fixed base) Planar Parallel Manipulators, Robotica. (Accepted).
- Pandurang S Londhe, Yogesh Singh, M.Santhakumar, Balasaheb Patre and Laxman M Waghmare (2016), Robust nonlinear PID-like fuzzy logic control of a planar parallel (2PRP-PPR) manipulator, ISA Transactions, 63, 218-232. (IF: 3.39) DOI: 10.1016/j.isatra.2016.02.016.
- V.Vinoth, Yogesh Singh, M.Santhakumar, (2014), Indirect disturbance compensation control of a planar parallel (2-PRP and 1-PPR) robotic manipulator, Robotics and Computer Integrated Manufacturing, 30(5), 556–564. (IF: 2.8) DOI: 10.1016/j.rcim.2014.03.010.
- Yogesh Singh, M.Santhakumar (2016), Performance investigations on optimum mechanical design aspects of planar parallel manipulators, Advanced Robotics, 30, 653-676. (IF: 0.57) DOI: 10.1080/01691864.2016.1144523.
- Yogesh Singh, V. Vinoth, Y.Ravi Kiran, Jayant Kumar Mohanta, M.Santhakumar (2015), Inverse dynamics and control of a 3-DOF planar parallel robotic (U-Shaped 3-PPR) manipulator, Robotics and Computer Integrated Manufacturing, 34, 164-179. (IF:2.8) DOI: 10.1016/j.rcim.2015.02.007.
- Yogesh Singh, M.Santhakumar (2015), Inverse dynamics and robust sliding mode control of a planar parallel (2-PRP and 1-PPR) robot augmented with a nonlinear disturbance observer, Mechanism and Machine Theory 92, 29-50 (IF:2.5) DOI:10.1016/j.mechmachtheory.2015.05.002.
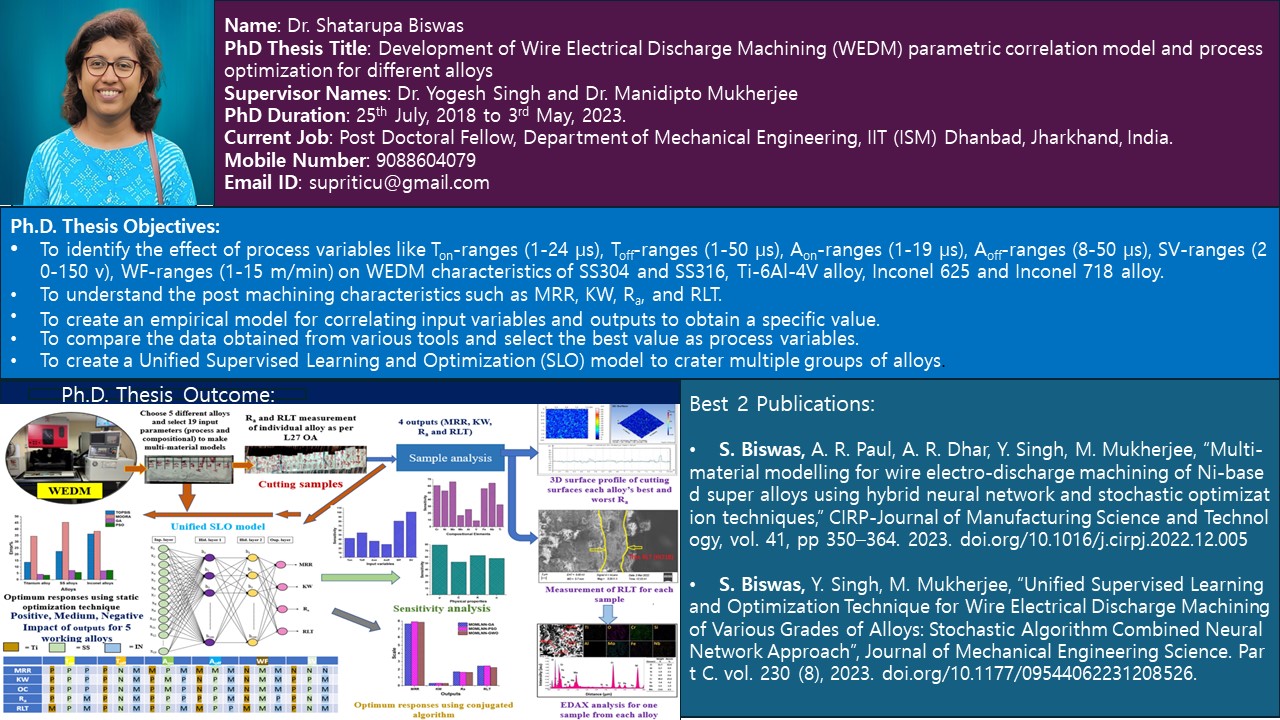
- S. Biswas, A. R. Paul, A. R. Dhar, Y. Singh, M. Mukherjee, “Multi-material modelling for wire electro-discharge machining of Ni-based super alloys using hybrid neural network and stochastic optimization techniques,” CIRP-Journal of Manufacturing Science and Technology, vol. 41, pp 350–364. 2023. doi.org/10.1016/j.cirpj.2022.12.005.
- S. Biswas, Y. Singh, M. Mukherjee, “Unified Supervised Learning and Optimization Technique for Wire Electrical Discharge Machining of Various Grades of Alloys: Stochastic Algorithm Combined Neural Network Approach”, Journal of Mechanical Engineering Science. Part C. 2023. doi.org/10.1177/09544062231208526.
- S. Biswas, A. R. Paul, Y. Singh, M. Mukherjee, “Enhanced Prediction and Optimization of WEDM for Titanium Alloy (Grade 5) with Hybrid Artificial Neural Network Based Meta-Heuristics”, International Journal on Interactive Design and Manufacturing (IJIDeM), 2024. (under review)
- Choudhury R, Singh Y. Development and performance investigations of the planar parallel robotic manipulators using shape memory alloy linear actuation technique. Proceedings of the Institution of Mechanical Engineers, Part E: Journal of Process Mechanical Engineering. 2023 Nov 23:09544089231216022.
- Choudhury R, Singh Y. Design development and control of a shape memory alloy linear actuation based XYθ motion stage. Engineering Research Express. 2023 Apr 14;5(2):025011.
- Choudhury R, Londhe P, Mohan S, Singh Y. A simplified approach to develop fuzzy logic controller with disturbance estimator for control of a planar parallel (2PRP-PPR) motion platform. Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science. 2023 May;237(10):2413-27.
- Choudhury R, Singh Y. Planar parallel manipulators: a review on kinematic, dynamic, and control aspects. Proceedings of the Institution of Mechanical Engineers, Part E: Journal of Process Mechanical Engineering. 2023 Mar 15:09544089231158187.
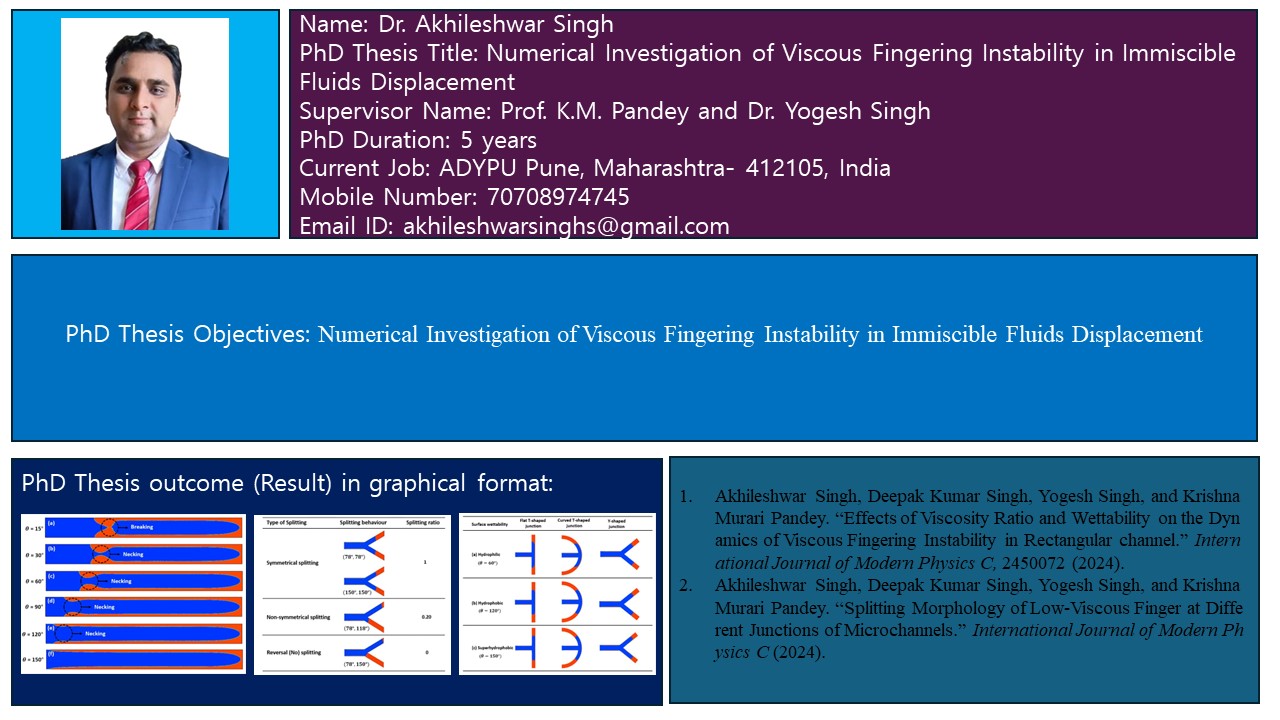
- Akhileshwar Singh, Deepak Kumar Singh, Yogesh Singh, and Krishna Murari Pandey. “Effects of Viscosity Ratio and Wettability on the Dynamics of Viscous Fingering Instability in Rectangular channel.” International Journal of Modern Physics C, 2450072 (2024).
- Akhileshwar Singh, Deepak Kumar Singh, Yogesh Singh, and Krishna Murari Pandey. “Splitting Morphology of Low-Viscous Finger at Different Junctions of Microchannels.” International Journal of Modern Physics C (2024). DOI: 10.1142/S0129183124501249
- Akhileshwar Singh, Krishna Murari Pandey and Yogesh Singh. “Tuning the Splitting Dynamics of Low-Viscous Fingers by Surface Wettability in Bifurcating Network.” International Journal of Fluid Mechanics Research (2023).
INTERNATIONAL CONFERENCES
- Ashutosh Padhan, Yogesh Singh (2020) DESIGN AND DEVELOPMENT OF A XY POSITIONING STAGE USING SHAPE MEMORY ALLOY SPRING ACTUATOR. International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- Shatarupa Biswas, Yogesh Singh and Manidipto Mukherjee (2020) An Over view of Wire Electrical Discharge Machining (WEDM). International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- Abhimanyu Pratap Singh, Atanu Paul, Yogesh Singh (2020) Design of a Modular Underwater ROV for Surveillance and Cleaning Purpose. International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- Singh D., Choudhury R., Singh Y. (2020) Kinematic, Dynamic and Stiffness Analysis of an Asymmetric 2PRP-PPR Planar Parallel Manipulator. International Conference on Advances in Mechanical Engineering (ICAME-2020), VNIT Nagpur, India, January 2020.
- Singh D., Singh Y., Mukherjee M. (2020) Behaviour of NiTi Based Smart Actuator for the Development of Planar Parallel Micro-Motion Stage. International Conference on Advances in Mechanical Engineering (ICAME-2020), VNIT Nagpur, India, January 2020.
- Singh D., Choudhury R., Singh Y., Mukherjee M. (2020) Development and Workspace Analysis of Smart Actuation based Planar Parallel Robotic Motion Stage. 3rd International Conference on Advances in Mechanical Engineering (ICAME-2020), SRMIST, Chennai, India, February 2020.
- Choudhury R., Singh D., Kumar A., Singh Y. (2020) Design and Fabrication of Android Application Based Grass Cutter Robotic System. International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- Singh D., Kumar R., Choudhury R., Padhan A., Singh Y. (2020) Development of Feature Extraction based Currency Recognition System using Artificial Neural Network. International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- Choudhury R., Singh D., Kumar A., Singh Y., Sahoo C.K. (2020) Development and Workspace Study of a 4-PP Planar Parallel XY Positioning Stage using SMA actuators. International Conference on Recent Advancements in Mechanical Engineering (ICRAME-2020), NIT Silchar, Assam, India, February 2020.
- S. P. Maghade, Y. K. Meena, Yogesh Singh, Santhakumar Mohan, Palani Anand iyamperumal (2013), Design and Simulation of Shape Memory Alloy Spring and its implementation in an Actuator, International Conference on Automation and Mechanical Systems, Faridabad, India, March, 2013.
- Yogesh Singh, C. P. Paul, Santhakumar Mohan, Palani Anand iyamperumal, LM Kukreja (2013), Fabrication and Analysis of Shape memory alloy (Ni-Ti) based Spline and Spring using Laser Rapid Manufacturing for micro positioning device development, IRAM 2013, IIT Indore, India, December, 2013.
- Yogesh Singh, M. Santhakumar (2014), Inverse Kinematic Modelling of a 6-DOF(6-CRS) Parallel Spatial Manipulator, AIMTDR, IIT Guwahati, India, December, 2014.
- Yogesh Singh, V. Vinoth, M. Santhakumar (2014), Dynamic modelling and control of a 3-DOF planar parallel robotic (X Y Theta Motion) platform, International conference on Advances in manufacturing and material engineering (ICAMME), NIT Surathkal, 5, 1528-1539. DOI: 10.1016/j.mspro.2014.07.340.
- V. Vinoth, Yogesh Singh, Jayant Kumar Mohanta, M. Santhakumar (2014), Robust disturbance observer based sliding mode control of a planar parallel (3-PPR) manipulator, IEEE Students Conference on Engineering and Systems (SCES), Allahabad, 1-6. DOI: 10.1109/SCES.2014.6880103.
- M. Santhakumar, J. Kim, Y. Singh (2015), A Robust Task Space Position Tracking Control of an Underwater Vehicle Manipulator System, Advances in Robotics, Goa, India, July 2015.
- Yogesh Singh, M. Santhakumar (2015), Comparative kinematic and dynamic performance analysis of planar parallel manipulators, Advances in Robotics, Goa, India, July 2015.
- Yogesh Singh, Santhakumar Mohan (2015), PID-like fuzzy logic control scheme for control of a planar parallel (3PPR U-base) manipulator, 2nd International and 17th National Conference on Machines and Mechanisms, IIT Kanpur, Article No. 5. DOI: 10.1145/2783449.2783454.
- Yogesh Singh, Santhakumar Mohan (2016), Kinematic performance analysis of a new 2PRP-PRR planar parallel robotic manipulator, The Fourth Joint International Conference on Multibody System Dynamics, Montréal, Québec, Canada, June 2016.
- Yogesh Singh, M. Santhakumar (2017), Development of a Planar 3PRP Parallel Manipulator using Shape Memory Alloy Spring based Actuators, Advances in Robotics, IIT Delhi, India, June 2017.
- S. Biswas, M. Mukherjee, Y. Singh, “Optimization of MRR and KW of SS316 in Wire by RSM Technique”, International Conferences on Recent Developments in Mechanical Engineering, NIT, Silchar, 2022. (accepted)
- S. Biswas, M. Mukherjee, Y. Singh, “Wire Electrical Discharge Machining of Titanium and Ceramics in Manufacturing Industry”, 2nd International Conference on Advanced Manufacturing Material Science, Kochi, 2022. (accepted)
- Choudhury R, S Saurabh, Singh Y. Development of a Shape Memory Alloy actuation based Planar 1PRR 2PRP Parallel Manipulator. ICRAME 2023 NIT SILCHAR.
- Kumar A., Choudhury R, Singh Y. Design and Development of 4PR Parallel lower limb rehabilitation robotic system. CRAME 2023 NIT SILCHAR.
WORKSHOP
1. 5 DAYS FDP on Electronic Systems for Mechanical Automation and Robotic Technology (eSMART 2019), 20.05.2019 to 24.05.2019
2. 5 DAYS FDP on Electronic Systems for Mechanical Automation and Robotic Technology (eSMART 2020), 10.09.2020 to 15.09.2020
3. One Week AICTE Training and Learning Academy (ATAL) Faculty Development Program on 3D Printing Design and Technology [AICTE ATAL DP], 19.07.2021 to 23.07.2021
4. Hands on training on the high-end equipment related to the current emerging fields of Robotics and Mechatronics, SERB Karyashala, 25-31, July 2023
Funded Projects
| S. No. | Funding Agency | Duration | Project Title | Cost (in Lakh) | Role |
| 1 | CSIR-EMR-II | 2020-2023 | Design and Development of a High-Speed Three-Dimensional Pinter with a Large Range of Micro Motion using a Scanning Stereo-lithography Technique | 27.30 | PI |
| 2 | SRG-SERB-DST | 2020-2022 | Design and development of a three-dimensional printer based on shape memory alloy smart actuator and micro stereo-lithography (MSL) technique | 30.82 | PI |
| 3 | SEED-TIDE DST | 2022-2025 | Design and Development of a SMART (shape memory alloy restoration technique) Actuation based Lower Limb Rehabilitation Robotic System | 33.13 | PI |
| 4 | Wardha DST | 2021–2025 | Design and Development of a SMART Lower Limb Rehabilitation Robotic System | 2.50 | PI |
| 5 | SEED-TIDE DST | 2021-2023 | Design and development of bath chair for safe bathing of elderly | 8.30 | CO-PI |
| 6 | POWER-SERB-DST | 2022-2025 | Design & Implementation of a hybrid underwater vehicle manipulator (HUVM) for cleaning of biofouling on a submerged pipeline in a sea | 41.79 | CO-PI |
| 7 | SERB-SIRE | 2024 | Design and development of SMA based micro system | 16 | PI |
PHD SCHOLARS
| Sl. No. | Name of the Scholar | Status | Research Area | Supervision |
| 1 | Rutupurna Choudhury | Completed (2018-2024) | Planar Parallel Manipulator and Micro-Motion Stage | Dr. Yogesh Singh |
| 2 | Shatrupa Biswas | Completed (2018-2023) | Development of wire electrical discharge machining (WEDM) parametric correlation model and process optimization for different alloys | Dr. Yogesh SinghDr. Manidipto Mukherjee |
| 3 | Akhileshwar Singh | Completed (2018-2024) | CFD Analysis of Viscous Fingering Instabilities in Hele-shaw Cell | Prof. K M PandeyDr. Yogesh Singh |
| 4 | Sunney Saurabh | (2022-Cont.) Ongoing | Micro Motion Platform | Dr. Yogesh Singh |
| 5 | Rishi yadav | (2023-Cont.) Ongoing | Mobile Robotic Manipulator | Dr. Yogesh Singh |
M.TECH. SCHOLARS
| Roll Number | Name | Year | Project Title |
| 2226101 | Prashant Shakya | 2024 | Design and Analysis of hybrid underwater vehicle for cleaning and surveillance |
| 2126206 | ABHISHEK KUMAR | 2023 | DESIGN AND DEVELOPMENT OF 4PR PARALLEL LOWER LIMB REHABILITATION ROBOTIC SYSTEM |
| 2026219 | Leonard A.L | 2022 | Design and Analyses of a Robot towards the Drawing and Learning Approach for Children |
| 1926204 | PUTREVU VENKATA KRISHNA CHAITANYA | 2021 | Numerical Modelling of SMA Actuated Positioning Stage |
| 1822202 | Sunny Kumar Saurabh | 2020 | Design and development of the Ni-Ti alloy (SMA) based compliant linear actuator |
| 1822214 | Anuj Kumar | 2020 | Design & development of XYθ Planar Parallel motion platform for precision movement of an object |
| 1822304 | Ashutosh Padhan | 2020 | DESIGN AND DEVELOPMENT OF A XY POSITIONING STAGE USING SHAPE MEMORY ALLOY SPRINGS |
| 1722302 | Rahul Kumar | 2019 | To Develop a Currency Recognition Technique from Feature Extraction |
| RA1712003010003 | DEEP SINGH | 2019 | DESIGN OF 3-DOF PLANAR PARALLEL ROBOTIC MANIPULATOR FOR MICRO – MOTION STAGE USING SMART ACTUATION (SRM INSTITUTE OF SCIENCE & TECHNOLOGY) |